AR Robotics
Abstract
Augmented reality training, or AR training, enhances training sessions by incorporating interactive digital objects into real-world environments. In Unity, developers can leverage the powerful tools and features to create immersive AR experiences that seamlessly blend virtual content with the physical world. With the Meta Quest 3 VR headset, users can engage in these AR training sessions in a fully immersive and hands-on manner. By utilizing Unity and the Meta Quest 3 VR headset, trainers can design dynamic simulations where trainees interact with virtual representations of equipment, such as the robot arm in your case, in a realistic environment. Trainees can practice operating the robot arm, learning its functionalities, and troubleshooting common issues in a safe and controlled setting. Unity's robust development environment allows for the creation of customized interactions, realistic physics simulations, and lifelike visualizations, ensuring that trainees receive a comprehensive learning experience. With the Meta Quest 3 VR headset's untethered design and advanced tracking capabilities, trainees can move freely within the training space, further enhancing immersion and engagement. Overall, the combination of Unity and the Meta Quest 3 VR headset offers a powerful platform for delivering effective AR training experiences, revolutionizing the way technicians learn to use and maintain equipment like robot arms.
AR Digital Twin for Robotic Arm Control
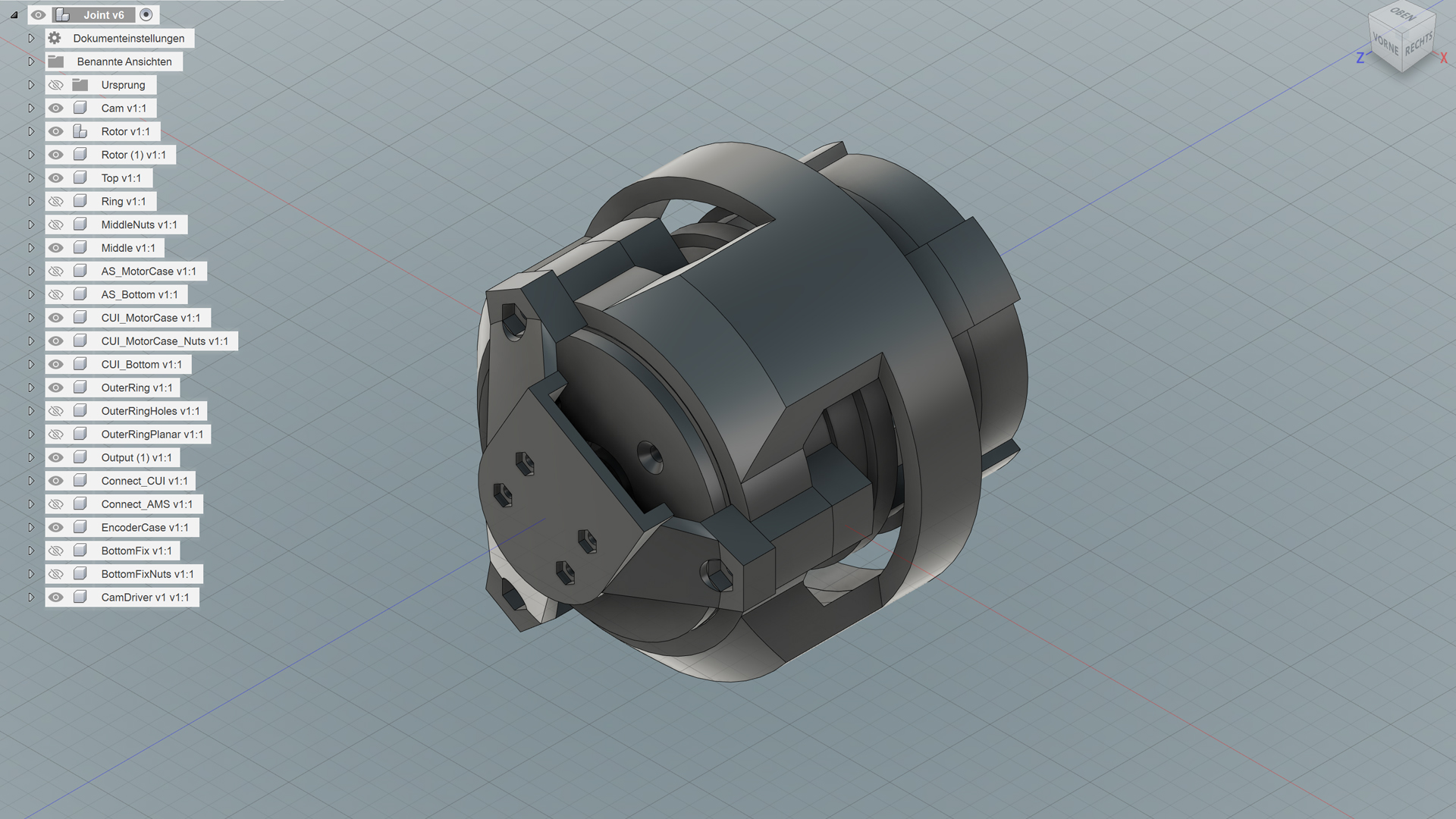
Robot design modeled in Fusion 360 is sent to 3D printing.
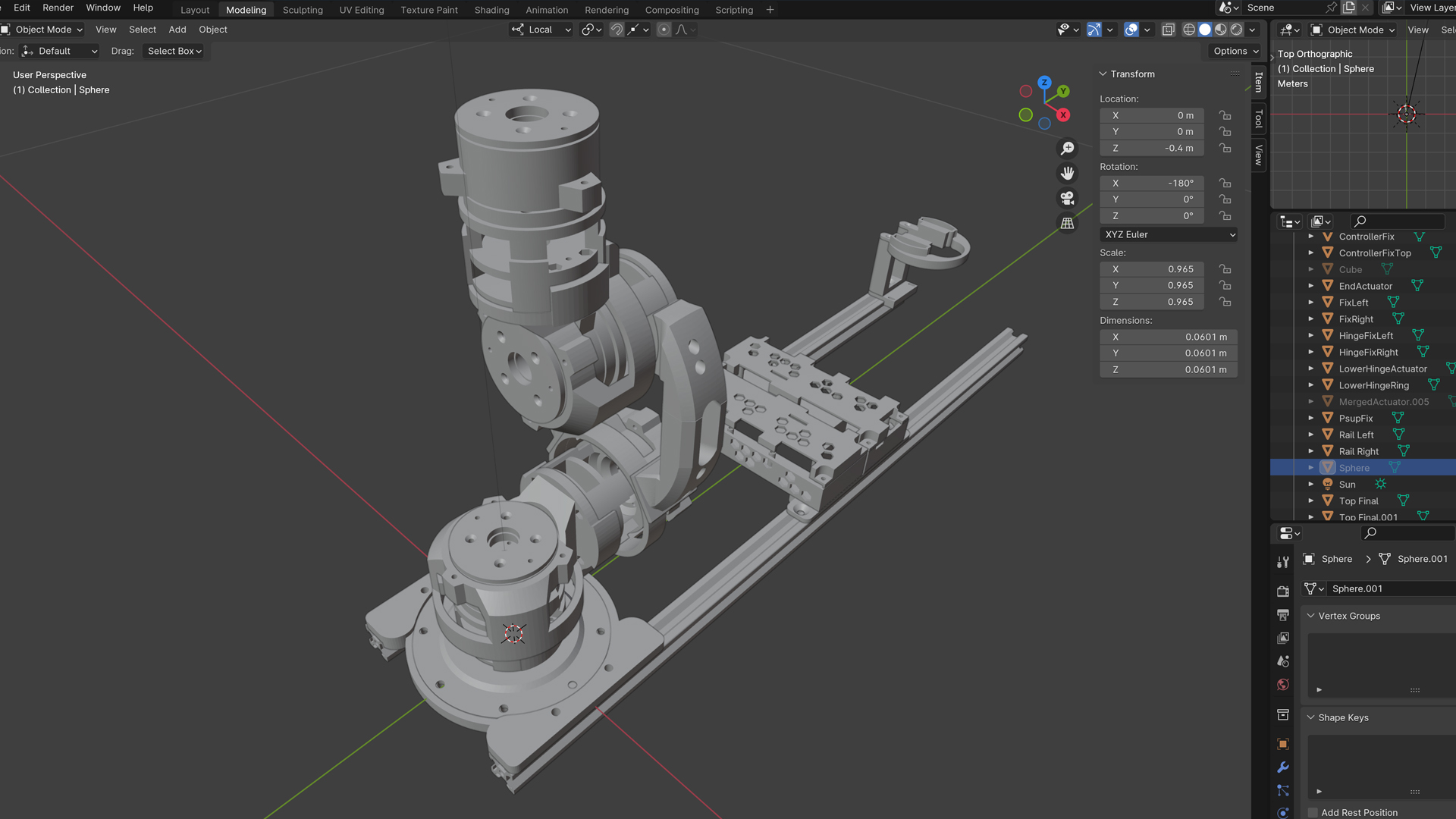
Digital representation of the robot arm assembled in Blender.
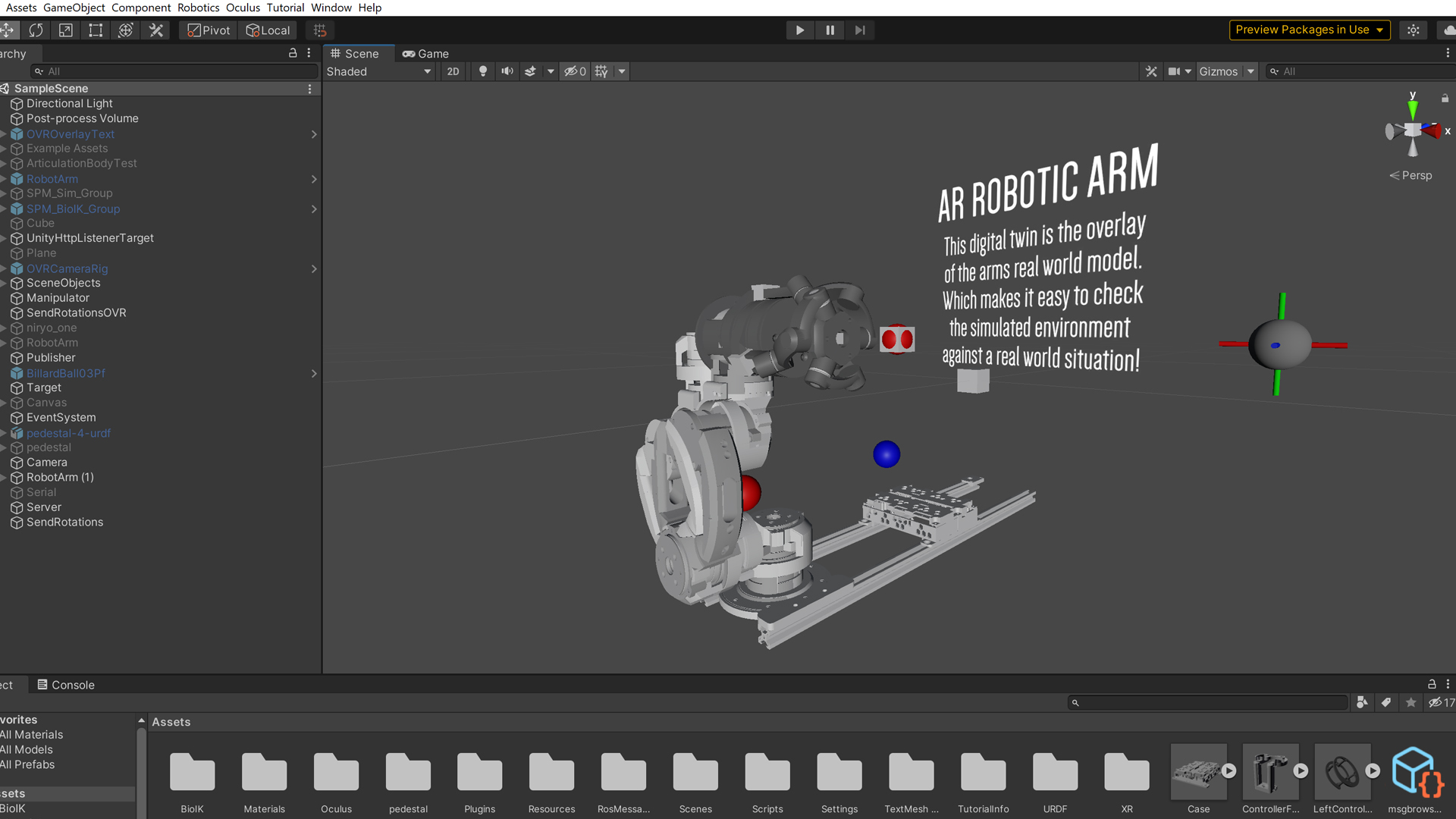
AR app developed in Unity.
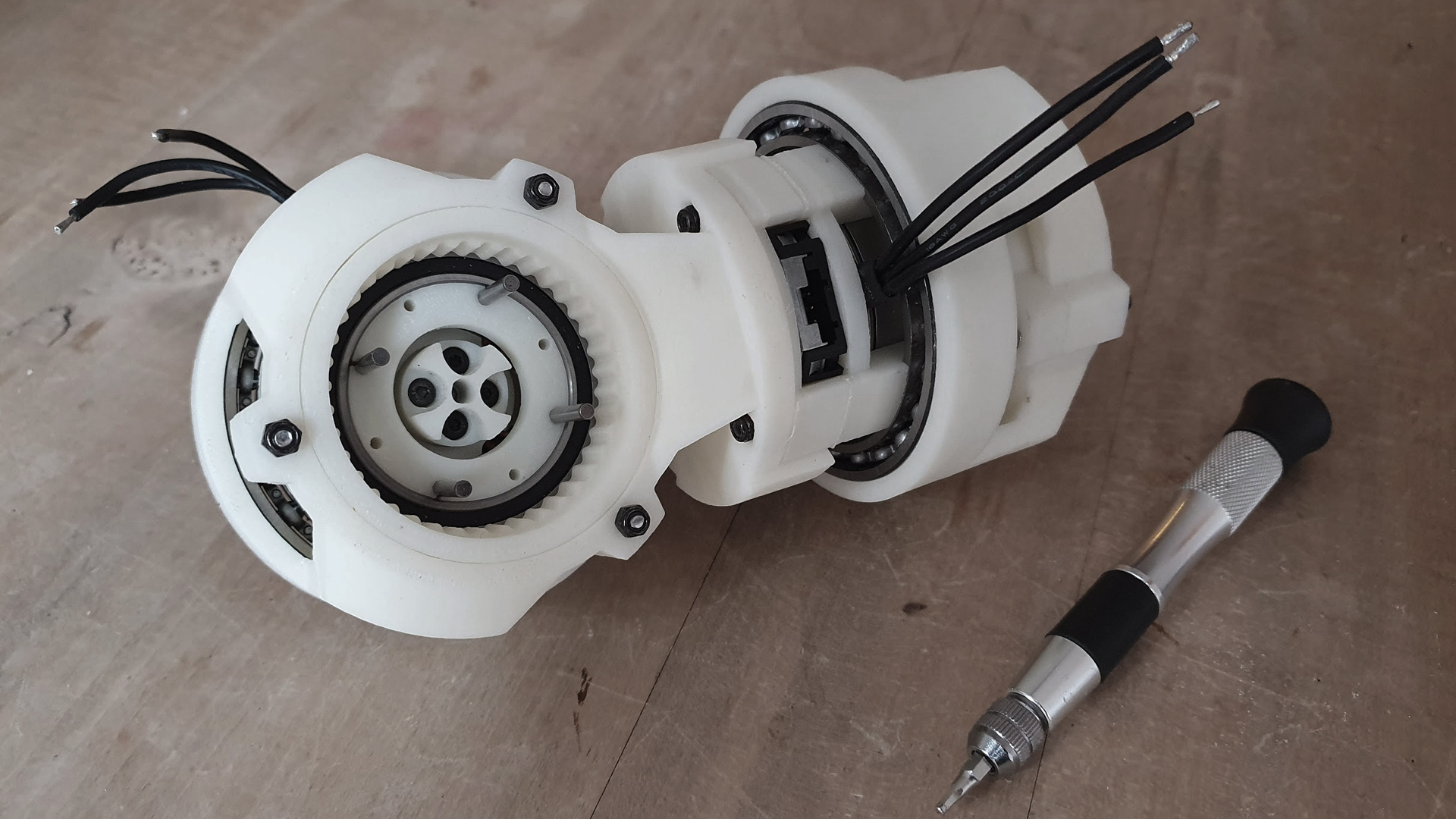
Printed 3D model of the robot arm.
Printing Files
![]()
All printing files can be found on my Printables profile.
For the arm, you can find the relevant files of the SPM on this page.
And the model for the Cycloidal Gearbox on this page.
All models are licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.
If you would like to contribute to solving the inverse kinematics of the SPM, please fork the Jupyter Notebook on this page.
Video Presentation
AR Digital Twin
This project explores the seamless integration of digital twin technology with real-world robotic systems to enhance human-robot interaction and control. The primary objective is to create a bridge between the virtual and physical worlds, enabling intuitive control and visualization of complex robotic systems.
Conclusion
The integration of digital twin technology with real-world robotic systems opens up new possibilities for human-robot interaction and collaboration. This project demonstrates the feasibility and potential of such integration, paving the way for future advancements in robotics and automation.